1701077800

1701077801
1701077802
1701077803
图15.8 风景照片的拍摄讲究层次感
1701077804
1701077805
探索与发现
1701077806
1701077807
网络上关于数码相机摄影有不少的教程,但是很少有人解释为什么我们要用一个麻烦的比值来代表光圈大小,而不直接使用它的直径。比如佳能Powershot A630,在它的镜头上标注着“7.3-29.2mm 1:2.8-4.1”(见图15.9),这一串数字的意思是它的焦距可以从7.3~29.2mm变化,而在不同焦距下的最大光圈为f/2.8~f/4.1。通过很简单地运算,我们得知7.3mm焦距时最大光圈直径为7.3/2.8=2.6mm,29.2mm焦距时最大光圈直径为29.2/4.1=7.1mm。根据“基本原理”小节的介绍,我们知道光圈直径越大允许进入的光越多,那么达到同样曝光程度,7.1mm的光圈所需要的快门时间应该比2.6mm光圈需要的少。实际情况呢?如果你尝试一下就会发现恰好相反,相机自动计算出来7.1mm光圈所需要的快门时间大约是2.6mm光圈所需时间的两倍。
1701077808
1701077809

1701077810
1701077811
1701077812
图15.9 佳能Powershot A630镜头标识
1701077813
1701077814
工程师们使用一个比值而不是直径来衡量光圈的大小自然是有他们的用意的。光圈直径与镜头焦距的比值衡量了这个镜头收集光线的能力,这个比值越小,收集光线的能力就越强,所需快门时间就越短。对于不同焦距的镜头,只要它们光圈的f值一样(尽管光圈的直径不一样)它们都具有相同的收集光线的能力,这一点我们可以从图15.10中看得更清。
1701077815
1701077816

1701077817
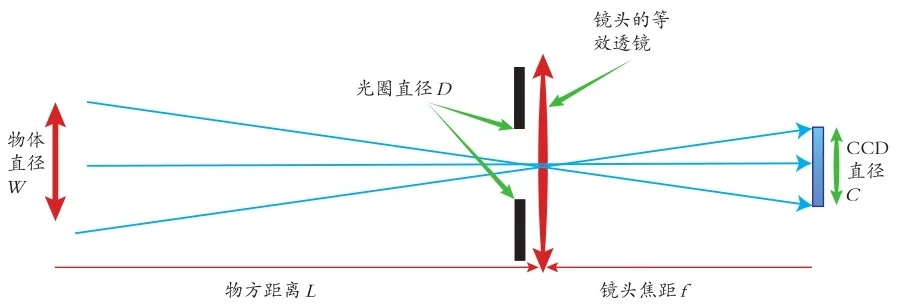
为了方便定量地讨论,假设我们要用照相机给非常远处的一个巨大的平面光源拍照。这个平面光源由密密麻麻的相同瓦数的小灯泡组成,每个灯泡向四面八方发光。相机的光圈和镜头可以等效为图15.10中的带有透光孔的简单透镜。由于光源离相机非常远,所以光源成的像就可以近似认为在镜头的焦距f上。为方便起见,假设CCD是圆形的,直径为C,那么容易从图15.10得知,这块CCD能够拍摄下直径为W=(L/f )×C的光源来。由于光圈的限制,这个光源上每个小灯泡发出的光只有一小部分能进入照相机并最终照亮CCD,这一部分占每个小灯泡发出的所有光线的比例为,即为光圈小孔的面积比上半径为L(物方距离)的球面面积。我们得到照亮CCD的总光强为:
1701077818
1701077819

1701077820

1701077821

1701077822

1701077823

1701077824
光源面积x小灯泡密度x每个小灯泡发出的光强度小灯泡密度x每个小灯泡发出的总的光强度=常数,其中的常数是光源的一些属性,与相机收集光线的能力无关。最后,衡量画面曝光量的指标是照射到CCD上的光强密度,所以还要除以CCD的面积,得到光强密度=常数。至此,我们推导出了一个光圈直径为D,焦距为f的镜头,对一个非常远处的光源发出来的光的收集能力由比值决定,而不是单由光圈直径D决定。所以不同焦距的镜头,只要它们的值相同,则它们需要相同的快门时间使得画面达到同样的曝光程度(当然,我们是指在拍摄同一个物体时)。
1701077825
1701077826
1701077827
1701077828
1701077829
图15.10 计算光圈收集光线的能力
1701077830
1701077831
现在你应该了解了为什么我们使用一个奇怪的比值来衡量光圈的大小了吧?这个比值(或者称为光圈的f值)不仅在照相机上,在其他各种光学成像设备上都随处可见。例如用于科学研究的大型天文望远镜,天文学家希望它们的f值越小越好。有些先进的望远镜的光圈值接近f/1,甚至小于1,比如亚利桑那大学铸造的直径24.5m的巨型麦哲伦望远镜[1],其光圈值为f/0.71。这样的望远镜被称为“快”的望远镜,因为它们的聚光能力强,拍摄相同曝光量的照片需要的时间短。而在一般大众使用的照相机中,f/2 . 8是比较常见的最大光圈值。如果想购买更“快”的镜头,比如f/1.8,则其价格往往会成倍增长。可见制造大光圈短焦距同时保证成像质量可不是一件容易的事情。
1701077832
1701077833
[1].关于巨型麦哲伦望远镜的铸造过程及相关介绍,请参阅《无线电》杂志2012年第7期的文章“镜观宇宙四百年”。
1701077834
1701077835
1701077836
1701077837
1701077838
我们都是科学家:那些妙趣横生而寓意深远的科学实验(修订版) [:1701074940]
1701077839
我们都是科学家:那些妙趣横生而寓意深远的科学实验(修订版) 16 PID控制原理与实践
1701077840
1701077841
1701077842
1701077843
一分钟简介
1701077844
1701077845
本章将介绍一个非常好用的控制方法:PID控制。首先我们从理论上理解它的来龙去脉,你会发现它其实非常直观易懂。然后我们利用PID控制,来实现清新脱俗的两个制作:电路控制下的上拉式磁悬浮和下推式磁悬浮。
1701077846
1701077847
闲话基本原理
1701077848
1701077849
PID控制,是Proportional、Integral和Differential的第一个字母的缩写,意为比例,积分和微分控制,我们可以用它来控制机械装置实现一种预先设定的状态。比如汽车上有一个功能就是无需驾驶员控制油门,也能保持恒定速度,这就是汽车中的电路通过PID控制实现的。如果遇到了一个下坡,汽车速度稍微超过设定值,PID控制就会减小引擎进油量,使速度减慢;如果遇到了一个上坡,汽车速度稍微低于设定值,PID控制就会增加引擎进油量,使速度增加。电路执行这样的操作非常迅速,所以坐在车上的人根本感觉不到汽车速度有任何变化。